Partitioning¶
Partitioning meshes is commonly needed in order to evenly distribute work
among many simulation ranks. Blueprint provides two partition() functions
that can be used to split or recombine Blueprint meshes in serial or parallel.
Full M:N repartioning is supported. The partition() functions are in the
serial and parallel Blueprint libraries, respectively.
// Serial
void conduit::blueprint::mesh::partition(const Node &mesh,
const Node &options,
Node &output);
// Parallel
void conduit::blueprint::mpi::mesh::partition(const Node &mesh,
const Node &options,
Node &output,
MPI_Comm comm);
Partitioning meshes using Blueprint will use any options present to determine how the partitioning process will behave. Typically, a caller would pass options containing selections if pieces of domains are desired. The partitioner processes any selections and then examines the desired target number of domains and will then decide whether domains must be moved among ranks (only in parallel version) and then locally combined to achieve the target number of domains. The combining process will attempt to preserve the input topology type for the output topology. However, in cases where lower topologies cannot be used, the algorithm will promote the extracted domain parts towards more general topologies and use the one most appropriate to contain the inputs.
In parallel, the partition() function will make an effort to redistribute data across MPI
ranks to attempt to balance how data are assigned. Domains produced from selections
are assigned round-robin across ranks from rank 0 through rank N-1 until all
domains have been assigned. This assignment is carried out after extracting
selections locally so they can be restributed among ranks
before being combined into the target number of domains.
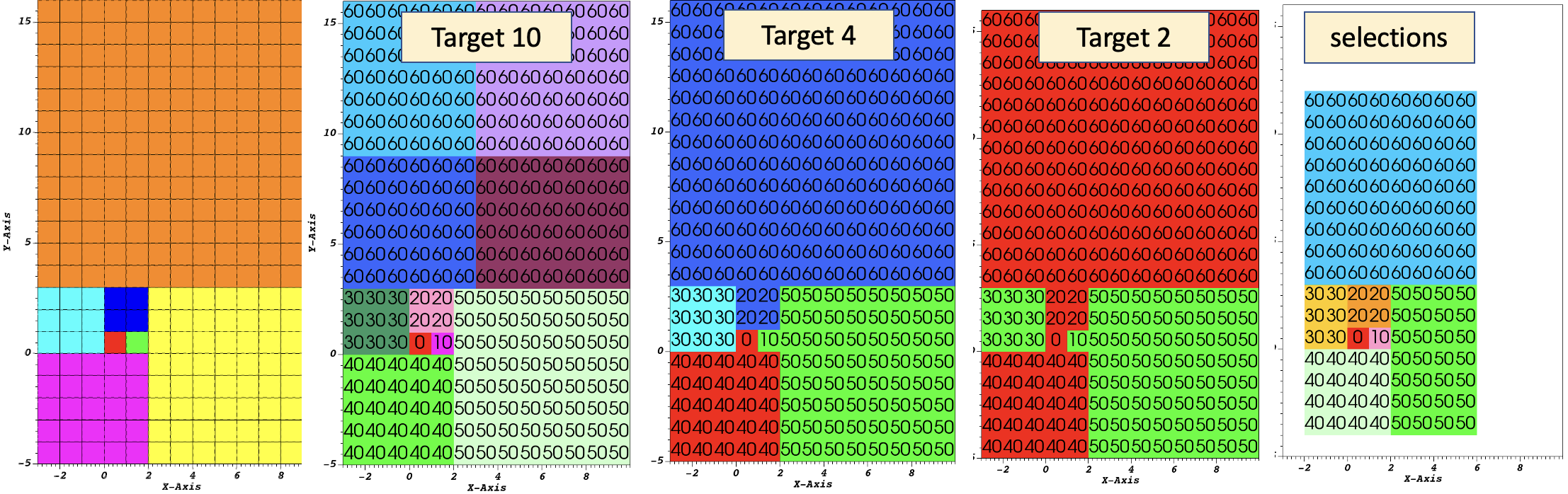
Partition used to re-partition a 7 domain mesh (left) to different target numbers of domains and to isolate logical subsets.¶
Options¶
The partition() functions accept a node containing options. The options node
can be empty and all options are optional. If no options are given, each input mesh
domain will be fully selected. It is more useful to pass selections as part of the
option node with additional options that tell the algorithm how to split or combine
the inputs. If no selections are present in the options node then the partitioner
will create selections of an appropriate type that selects all elements in each
input domain.
The target option is useful for setting the target number of domains in the
final output mesh. If the target value is larger than the number of input domains
or selections then the mesh will be split to achieve that target number of domains.
This may require further subdividing selections. Alternatively, if the target is
smaller than the number of selections then the selections will be combined to
yield the target number of domains. The combining is done such that smaller element
count domains are combined first.
Option |
Description |
Example |
selections |
A list of selection objects that identify regions of interest from the input domains. Selections can be different on each MPI rank. |
selections:
-
type: logical
start: [0,0,0]
end: [9,9,9]
domain_id: 10
|
target |
An optional integer that determines the fields containing original domains and number of domains in the output. If given, the value must be greater than 0. Values larger than the number of selections cause domains to be split. Values smaller than the number of selections cause domains to be combined. Invalid values are ignored. If not given, the output will contain the number of selections. In parallel, the largest target value from the ranks will be used for all ranks. |
target: 4
|
fields |
An list of strings that indicate the names of the fields to extract in the output. If this option is not provided, all fields will be extracted. |
fields: ["dist", "pressure"]
|
mapping |
An integer that determines whether fields containing original domains and ids will be added in the output. These fields enable one to know where each vertex and element came from originally. Mapping is on by default. A non-zero value turns it on and a zero value turns it off. |
mapping: 0
|
build_adjsets |
An integer that determines whether the partitioner should build adjsets, if they are present in the selected topology. |
build_adjsets: 1
|
merge_tolerance |
A double value that indicates the max allowable distance between 2 points before they are considered to be separate. 2 points spaced smaller than this distance will be merged when explicit coordsets are combined. |
merge_tolerance: 0.000001
|
original_element_ids |
A string value that provides desired field name used to contain original element ids created from partitioning. The default value is original_element_ids. |
|
original_vertex_ids |
A string value that provides desired field name used to contain original vertex ids created from partitioning. The default value is original_vertex_ids. |
Selections¶
Selections can be specified in the options for the partition() function to
select regions of interest that will participate in mesh partitioning. If
selections are not used then all elements from the input meshes will be
selected to partitipate in the partitioning process. Selections can be further
subdivided if needed to arrive at the target number of domains. Selections can
target specific domains and topologies as well. If a selection does not apply
to the input mesh domains then no geometry is produced in the output for that
selection.
The partition() function’s options support 4 types of selections:
Selection Type |
Topologies |
Description |
|---|---|---|
logical |
uniform,rectilinear,structured |
Identifies start and end logical IJK ranges to select sub-bricks of uniform, rectilinear, or structured topologies. This selection is not compatible with other topologies. |
explicit |
all |
Identifies an explicit list of element ids and it works with all topologies. |
ranges |
all |
Identifies ranges of element ids, provided as pairs so the user can select multiple contiguous blocks of elements. This selection works with all topologies |
field |
all |
Uses a specified field to indicate destination domain for each element. |
By default, a selection does not apply to any specific domain_id. A list of selections applied to a single input mesh will extract multiple new domains from that original input mesh. Since meshes are composed of many domains in practice, selections can also be associated with certain domain_id values. Selections that provide a domain_id value will only match domains that either have a matching state/domain_id value or match its index in the input node’s list of children (if state/domain_id is not present).
Selections can apply to certain topology names as well. By default, the first
topology is used but if the topology name is provided then the selection will
operate on the specified topology only.
Option |
Description |
Example |
type |
The selection type |
selections:
-
type: logical
|
domain_id |
The domain_id to which the selection will apply. This is almost always an unsigned integer value. For field selections, domain_id is allowed to be a string “any” so a single selection can apply to many domains. |
selections:
-
type: logical
domain_id: 10
selections:
-
type: logical
domain_id: any
|
topology |
The topology to which the selection will apply. This is important if the data contain multiple topologies. |
selections:
-
type: logical
domain_id: 10
topology: mesh
|
Logical Selection¶
The logical selection allows the partitioner to extract a logical IJK subset from uniform, rectilinear, or structured topologies. The selection is given as IJK start and end values. If the end values extend beyond the actual mesh’s logical extents, they will be clipped. The partitioner may automatically subdivide logical selections into smaller logical selections, if needed, preserving the logical structure of the input topology into the output.
selections:
-
type: logical
start: [0,0,0]
end: [9,9,9]
Explicit Selection¶
The explicit selection allows the partitioner to extract a list of elements. This is used when the user wants to target a specific set of elements. The output will result in an explicit topology.
selections:
-
type: explicit
elements: [0,1,2,3,100,101,102]
Ranges Selection¶
The ranges selection is similar to the explicit selection except that it identifies ranges of elements using pairs of numbers. The list of ranges must be a multiple of 2 in length. The output will result in an explicit topology.
selections:
-
type: ranges
ranges: [0,3,100,102]
Field Selection¶
The field selection enables the partitioner to use partitions done by other tools
using a field on the mesh as the source of the final domain number for each element.
The field must be associated with the mesh elements. When using a field selection,
the partitioner will make a best attempt to use the domain numbers to extract
mesh pieces and reassemble them into domains with those numberings. If a larger
target value is specified, then field selections can sometimes be partitioned further
as explicit partitions. The field selection is unique in that its domain_id value
can be set to “any” if it is desired that the field selection will be applied to
all domains in the input mesh. The domain_id value can still be set to specific
integer values to limit the set of domains over which the selection will be applied.
Option |
Description |
Example |
field |
The name of the element field that will be used for partitioning. The field shall contain non-negative domain numbers. |
selections:
-
type: field
domain_id: any
|
destination_ranks |
An optional list of integers representing the MPI rank where the domain will be sent after partitioning. This option can help ensure domains for topologies partitioned via multiple calls to partition() end up together on a target MPI rank. The example shows domain 0 going to MPI rank 0 and so on. |
selections:
-
type: field
field: partField
destination_ranks: [0,1,2,3]
domain_id: any
|
selections:
-
type: field
domain_id: any
field: fieldname
topology: main
Multiple Topologies¶
The partition() function is flexible but it is currently limited to partitioning a single topology at
a time. To handle multiple topologies (volume mesh, boundary mesh, corner mesh, etc.) the partitioner must
be applied in succession to each input mesh. The output node for the partition() function should
contain a new Conduit node since it will be reset. After executing, the new partitioned topology can be
moved into a different node if all topologies must remain together. This also provides an opportunity to
use Blueprint functionality such as rewrite_connectivity(), which can rewrite a topology’s connectivity
in terms of a different coordset. This can be used, for example, to change a partitioned boundary mesh so
it uses the same coordset as its associated partitioned volume mesh.
Mapping Back¶
After using the partition() function to create a partitioned mesh, it is common that
updates will be made to fields on the partitioned mesh. These updates can be propagated
back to the original mesh using the partition_map_back() function.
// Serial
void conduit::blueprint::mesh::partition_map_back(const Node &part_mesh,
const Node &options,
Node &orig_mesh);
// Parallel
void conduit::blueprint::mpi::mesh::partition_map_back(const Node &part_mesh,
const Node &options,
Node &orig_mesh,
MPI_Comm comm);
The function accepts the same options as the partition() function but it will use only
the “fields”, “original_element_ids”, and “original_vertex_ids” options. The “fields” option
contains a list of fields that will be mapped back to the original mesh. The fields can be
element-associated or vertex-associated, though in the latter case, a global node ids field
must be present. The fields are mapped back with the help of the “original_element_ids” and
“original_vertex_ids” fields, though the names of the fields can be changed via options. Since
these fields indicate the original domain and id for each field value, Blueprint can use them
to copy data back onto the original mesh. If the original mesh’s field can accommodate the
data then the values are copied back into the existing field memory, which can be useful if
the field was exposed to Conduit using a Node::set_external() method call. If the
destination field cannot fit the copied data then new storage will be allocated.